Karan Muvvala
Karan Muvvala
Home
News
Publications
Talks
Light
Dark
Automatic
Publications
Type
Conference paper
Preprint
Thesis
Date
2023
2022
2021
Stochastic Games for Interactive Manipulation Domains
In this work, we explore stochastic games as an abstraction for modeling human-robot interaction with stochastic action outcomes and irrational agents. We also improve scalabiltiy of exisitng tool PRISM-games.
Karan Muvvala
,
Andrew Wells
,
Morteza Lahijanian
,
Lydia Kavraki
,
Moshe Vardi
Cite
Efficient Symbolic Approaches for Quantitative Reactive Synthesis with Finite Tasks (IROS 23)
In this work, we introduce a method of symbolic value iteration for quantitative tow-player games with reachability objectives and with resource constraints.
Karan Muvvala
,
Morteza Lahijanian
PDF
Cite
Code
Video
Experiments
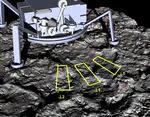
REASON-RECOURSE Software for Science Operations of Autonomous Robotic Landers (accepted IEEE AeroConf 23)
In this work, we introduce a Preference based correct-by-construction planning framework (REASON-RECOURSE) for efficient exploration of icy moons likes Europa.
Jay McMahon
,
Nisar Ahmed
,
Morteza Lahijanian
,
Peter Amorese
,
Taralicin Deka
,
Karan Muvvala
,
Trevor Slack
,
Shohei Wakayama
,
Kian Shakerin
PDF
Cite
Safety Guarantees for Neural Network Dynamic Systems via Stochastic Barrier Functions (accepted NeurIPS 22)
In this work, we introduce a method of safety certification and control for neural network dynamic systems via stochastic barrier functions.
Rayan Mazouz
,
Karan Muvvala
,
Akash Ratheesh
,
Luca Laurenti
,
Morteza Lahijanian
PDF
Cite
Code
Video
OpenReview
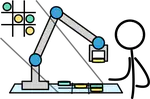
Let's Collaborate: Regret-based Reactive Synthesis for Robotic Manipulation
Synthesizing human-like behavior for robots by reasoning about the human’s action to synthesize smarter interactions.
Karan Muvvala
,
Peter Amorese
,
Morteza Lahijanian
Cite
Code
Poster
Slides
Video
ArXiv
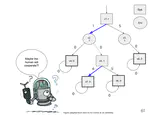
Expert-Informed Autonomous Science Planning for In-situ Observations and Discoveries
Enabling future planetory exploration missions to the icy moons of Jupiter by developing novel, safe and reliable autonomy stack using Formal Methods and Game Theory.
Jay McMahon
,
Nisar Ahmed
,
Morteza Lahijanian
,
Peter Amorese
,
Taralicin Deka
,
Karan Muvvala
,
Trevor Slack
,
Shohei Wakayama
PDF
Cite
Human-Aware Strategy Synthesis for Robotic Manipulators Using Regret Games
My MS Thesis on synthesizing human-like behaviors for a robot for smarter interactions in collaborative scenarios using the notion of regret.
Karan Muvvala
PDF
Cite
Code
Slides
Cite
×